
Estimating depth from a sequence of posed RGB images is a fundamental computer vision task, with applications in augmented reality, path planning etc. Prior work typically makes use of previous frames in a multi view stereo framework, relying on matching textures in a local neighborhood. In contrast, our model leverages historical predictions by giving the latest 3D geometry data as an extra input to our network. This self-generated geometric hint can encode information from areas of the scene not covered by the keyframes and it is more regularized when compared to individual predicted depth maps for previous frames. We introduce a Hint MLP which combines cost volume features with a hint of the prior geometry, rendered as a depth map from the current camera location, together with a measure of the confidence in the prior geometry. We demonstrate that our method, which can run at interactive speeds, achieves state-of-the-art estimates of depth and 3D scene reconstruction in offline, incremental, and revisit evaluation scenarios.
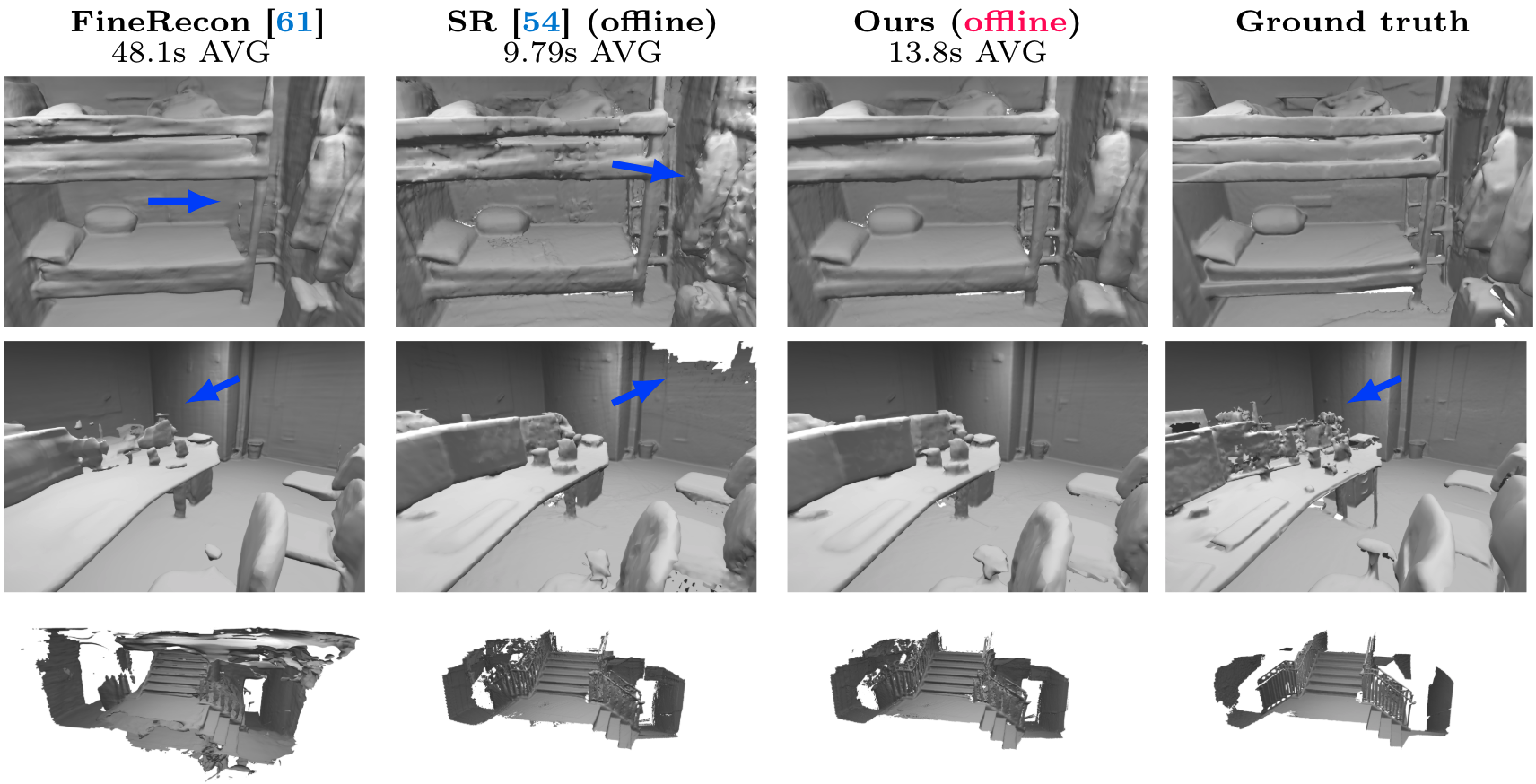
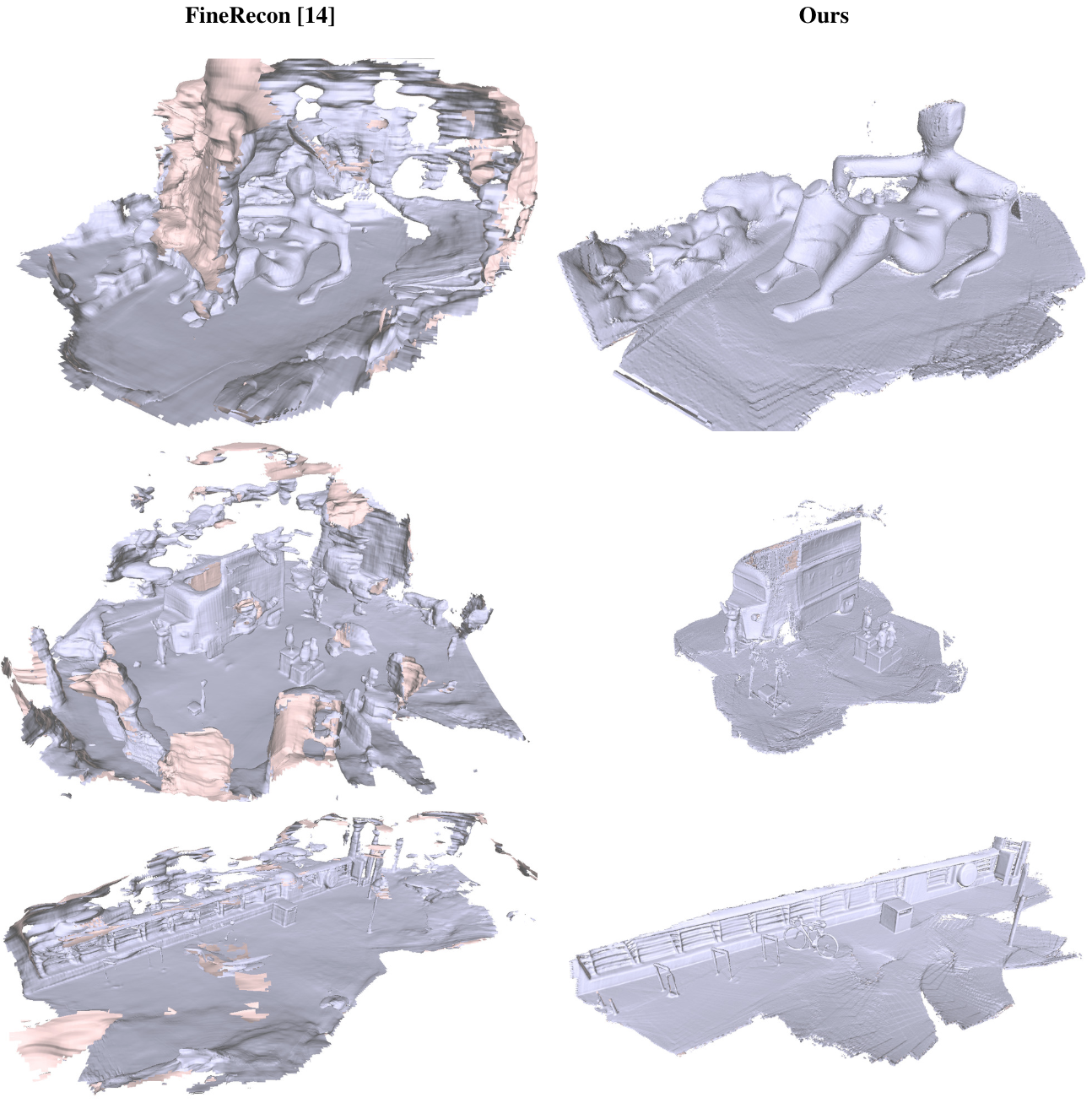
Our key contribution is the injection of cheaply-available metadata into the feature volume. Each volumetric cell is then reduced in parallel with an MLP into a feature map before input into a 2D cost volume encoder-decoder. We also make use of an image encoder specifically used to enforce a strong image prior when propagating and correcting depth estimates from the cost volume throughout the frame in the cost volume encoder-decoder. This formulation is flexible and allows for three different operating modes: 1) incremental for online depth and reconstruction at 76.6ms per frame, 2) offline for high-quality offline depth and reconstruction at 13.8s per scene, and 3) revisit for depth estimation when revisiting locations after a long absence at 62.8ms per frame.
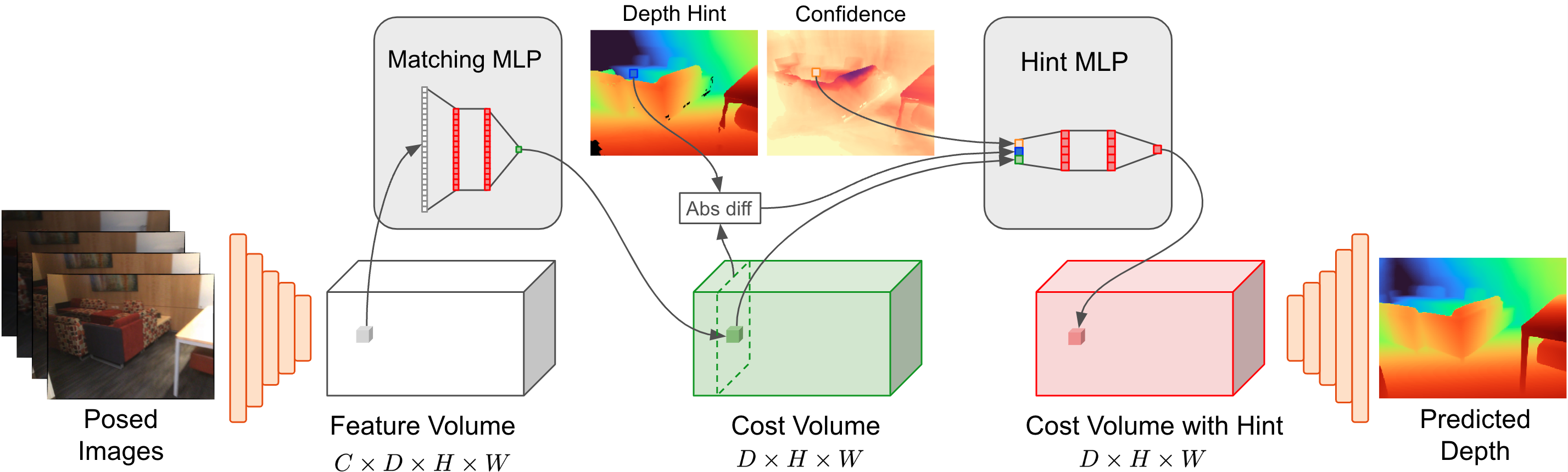
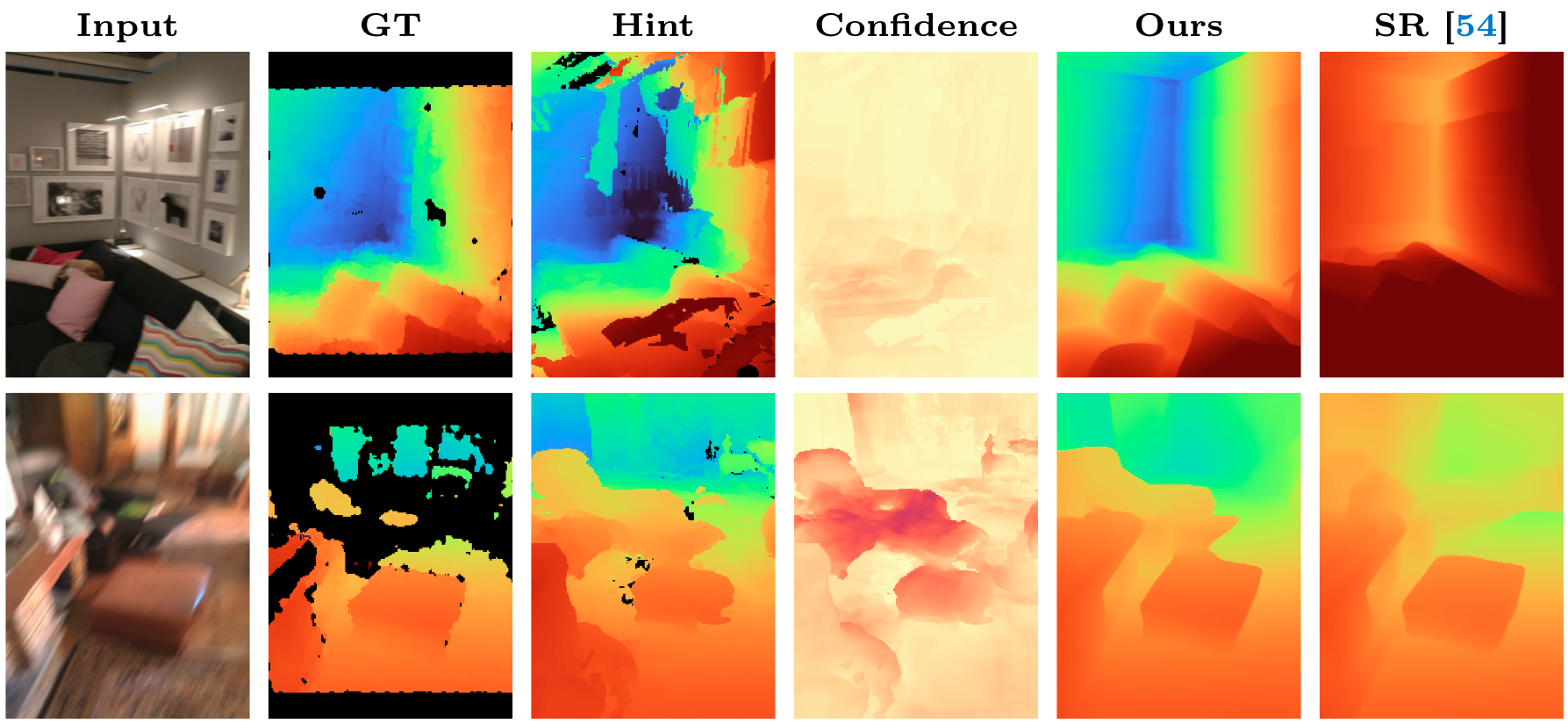
Geometry Injection Our feature volume is reduced to a cost volume via a matching MLP. Our Hint MLP then combines the multi-view-stereo cost volume with an estimate of previously predicted geometry. For every location in the cost volume, the Hint MLP takes as input (i) the visual matching score, (ii) the geometry hint, formed as the absolute difference between the rendered depth hint and the depth plane at that cost volume position, and (iii) an estimate of the confidence of the hint at that pixel.


If you find this work useful for your research, please cite:
@inproceedings{sayed2024doubletake,
title={DoubleTake: Geometry Guided Depth Estimation},
author={Mohamed Sayed and Filippo Aleotti and Jamie Watson and Zawar Qureshi and Guillermo Garcia-Hernando and Gabriel Brostow and Sara Vicente and Michael Firman},
booktitle={Proceedings of the European Conference on Computer Vision (ECCV)},
year={2024},
}
© This webpage was in part inspired from this template.